KTH Longterm Dataset¶

KTH Scitos G5 robot - Rosie
The data was collected autonomously by a Scitos G5 robot with an RGB-D camera on a pan-tilt, navigating through the KTH office environment over a period of approximately 30 days. Each observation consists of a set of 51 RGB-D images obtained by moving the pan-tilt in a pattern, in increments of 20 degrees horizontally and 25 vertically. Waypoints are visited between 80 and 100 times and a total of approximately 720 observations are collected at the eight waypoints that can be seen in the figure below. The data is a part of the Strands EU FP7 project.
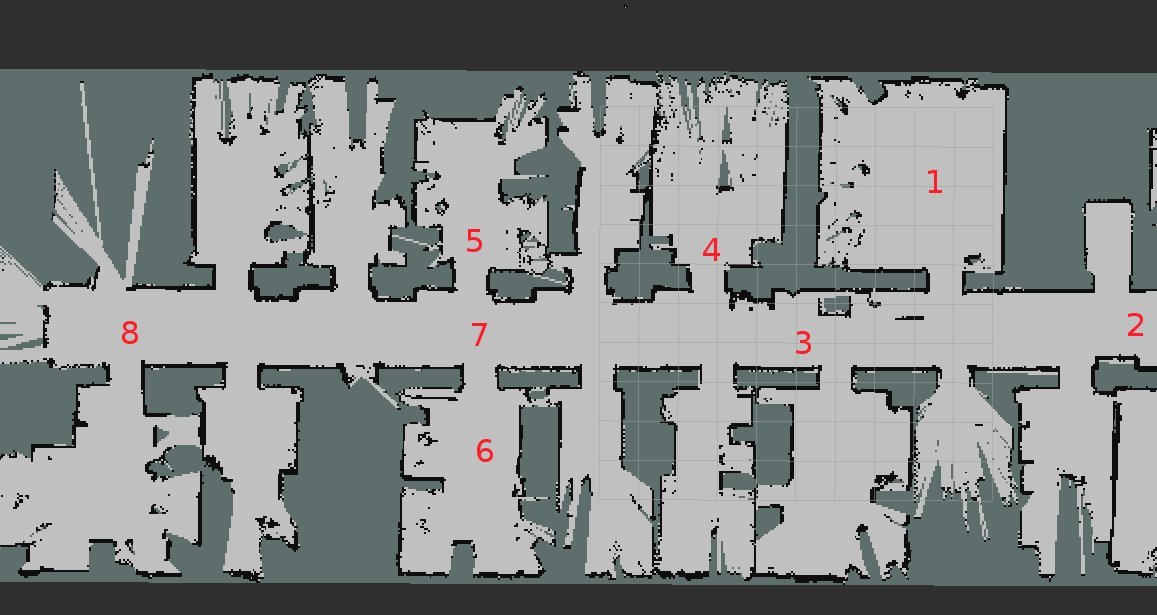
WayPoint positions on the map
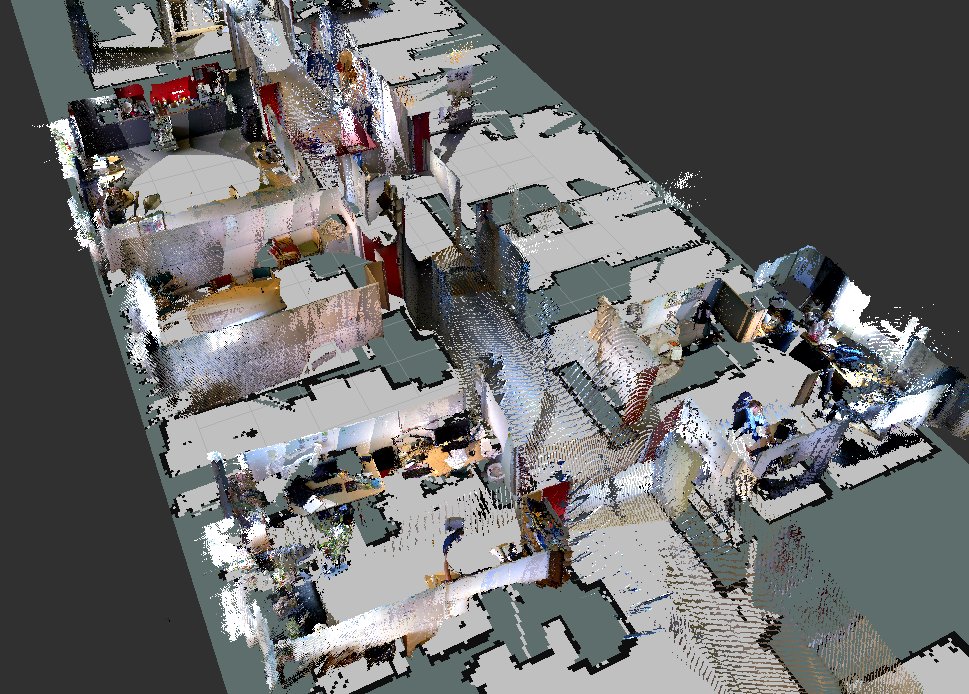
Observations overlayed on the 2D map
Dataset structure¶
The data is structured in folders as follows: YYYYMMDD/patrol_run_YYY/room_ZZZ, where:
- YYYYMMDD represents the year, month & day when those particular observations were acquired. Each such folder contains the patrol runs the robot collected on that specific date.
- patrol_run_YYY represents one of the patrol runs collected by the robot.
- room_ZZZ represents a particular observation collected during a patrol run.
Each folder of the type YYYMMDD/patrol_run_YYY/room_ZZZ contains the following files:
- room.xml - contains information relevant for the observation (described in the next section)
- complete_cloud.pcd - the point cloud of the observation (obtained by merging the individual point clouds together)
- intermediate_cloud*.pcd - ordered point clouds, each corresponding to an RGB and depth image acquired by the camera while conducting the sweep (51 such point clouds for each observation)
The room.xml file accompanying an observation contains the following (relevant) fields:
RoomLogName - identifier which associates the observation with the folder structure
RoomRunNumber - identifier which denotes when the observation was acquired during the patrol run (i.e. 0 - first, 1 - second, etc.)
RoomStringId - identifier which corresponds to the waypoint at which the observation was acquired.
RoomLogStartTime / RoomLogEndTime - acquisition time
Centroid - observation centroid in the map frame
RoomCompleteCloud - complete cloud filename
RoomIntermediateClouds
RoomIntermediateCloud - intermediate cloud filename
- RoomIntermediateCloudTransform - transform from the RGB-D sensor frame to the map frame, as given by the robot odometry
- RoomIntermediateCloudTransformRegistered - transform which corrects the pose of the intermediate clouds so that they are well registered with respect to each other
Parsing¶
A parser is provided here (can be installed with `` sudo apt-get install ros-indigo-metaroom-xml-parser``) which reads in the data and returns C++ data structures encapsulating the low-level data from the disk. Form more information please refer to the parser README ( or here for a list of supported methods). Information about how to use the Strands package repository can be found here.
Download¶
This dataset is available for download in a single archive file (~ 300 GB). As an alternative, the individual folders and files can be obtained from here, and would have to be downloaded manually.
Condition of use¶
If you use the dataset for your research, please cite our paper that describes it:
Unsupervised learning of spatial-temporal models of objects in a long-term autonomy scenario
Ambrus, Rares and Ekekrantz, Johan and Folkesson, John and Jensfelt, Patric
Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on
We attached a bibtex record for your convenience.
Original page: https://strands.pdc.kth.se/public/KTH_longterm_dataset_registered/readme.html